
Introduction
Results
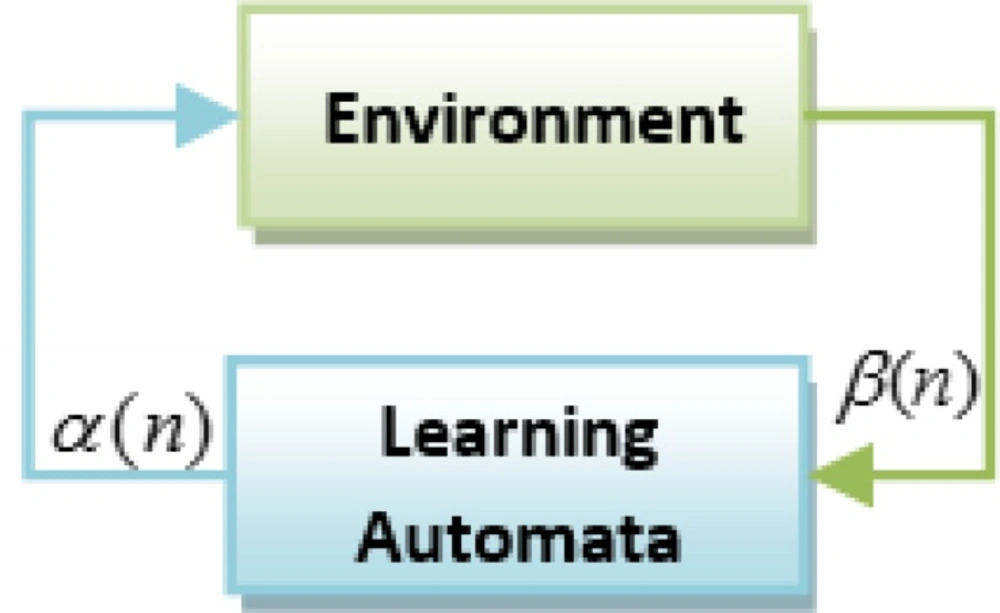
Learning automata connection with environment(16).
Proposed Genetic Algorithm flowchart
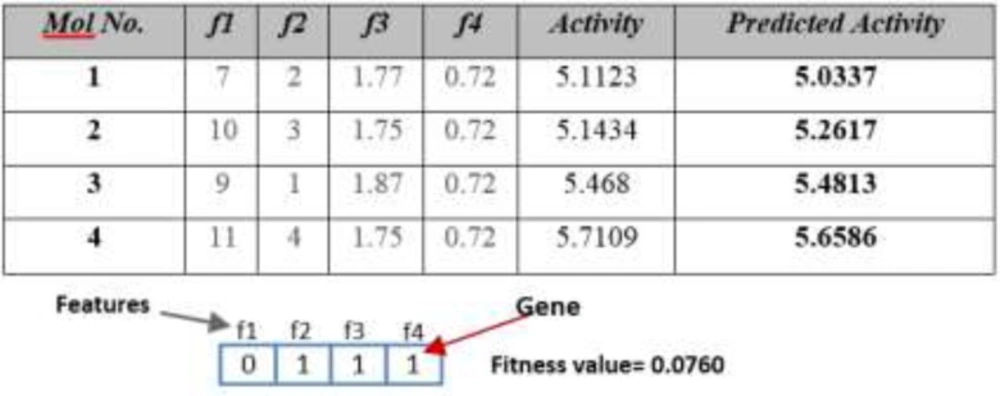
A sample of QSAR dataset and the relative random chromosome. Every feature, in dataset, is equal to a gene in chromosome. Gene value will be 1 if correspond feature is selected, and otherwise it will be 0
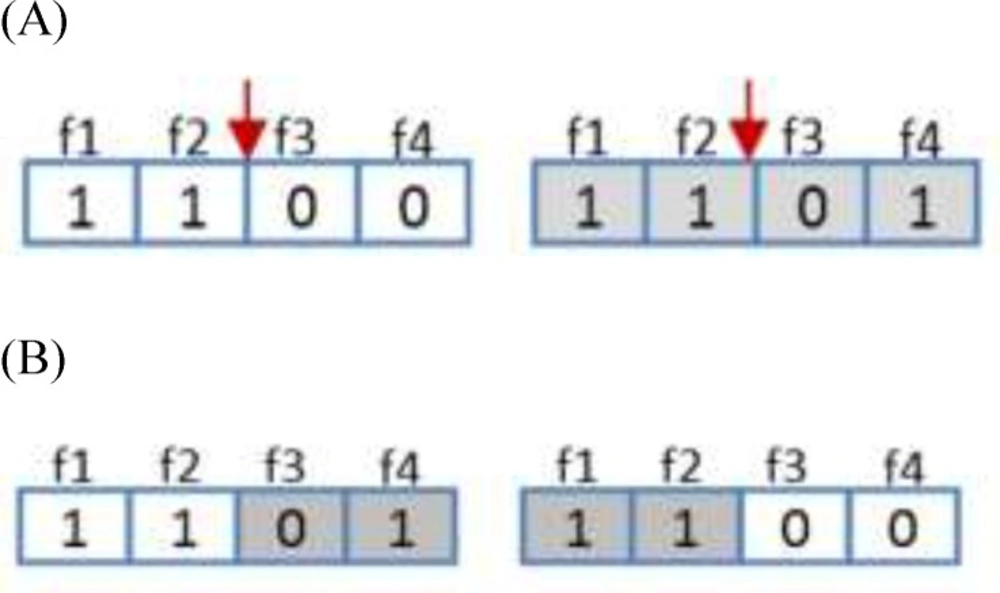
Crossover operator. (A) Two new chromosomes before crossover. (B) Two random chromosomes after crossover.
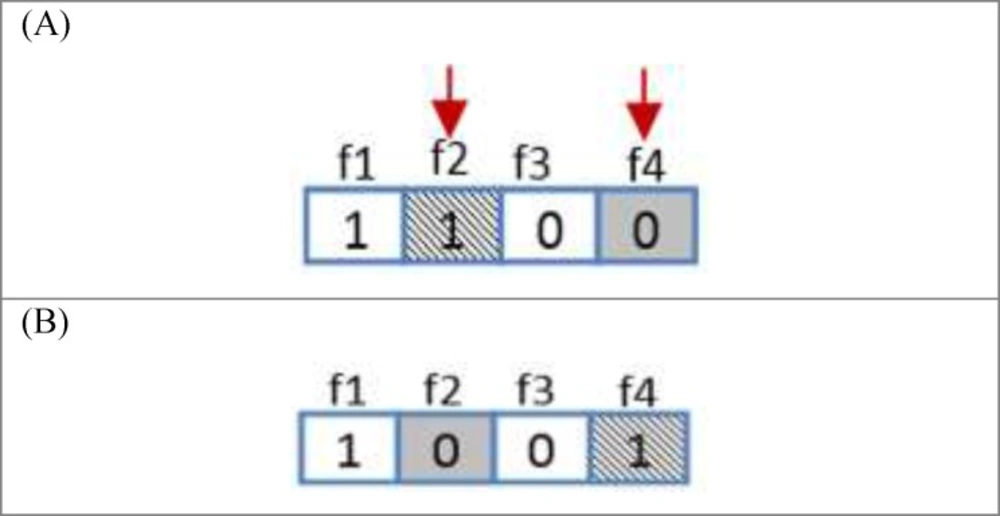
Mutation operator. (A) Resulted chromosome before mutation. (B) A random chromosome after mutation.
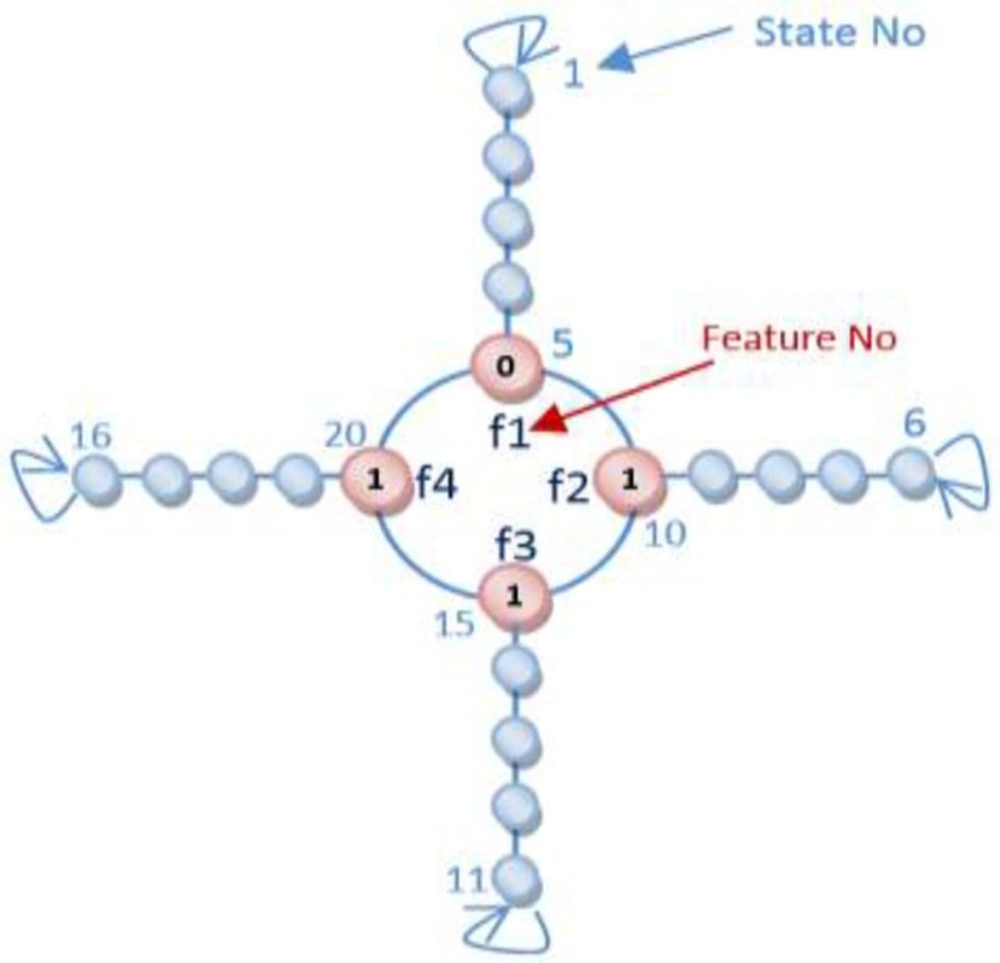
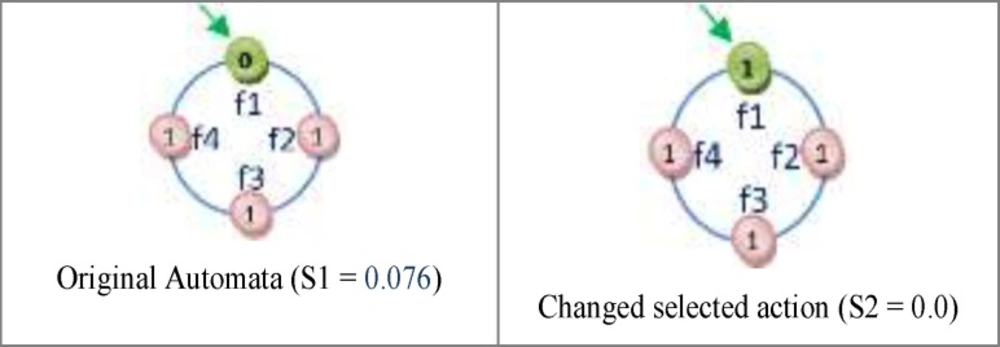
An equivalent automaton for chromosome in Figure 3.
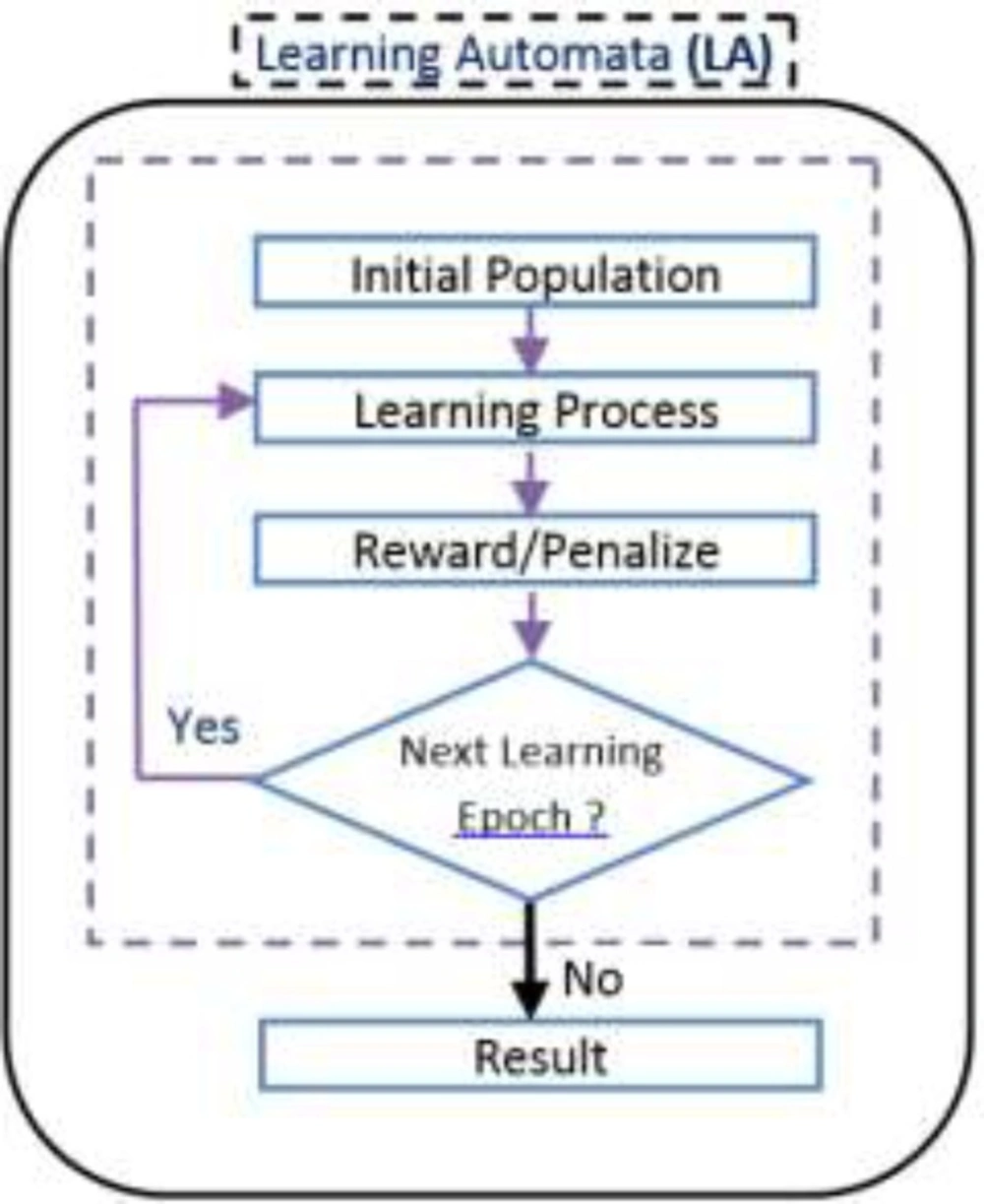
Proposed Learning Automata flowchart
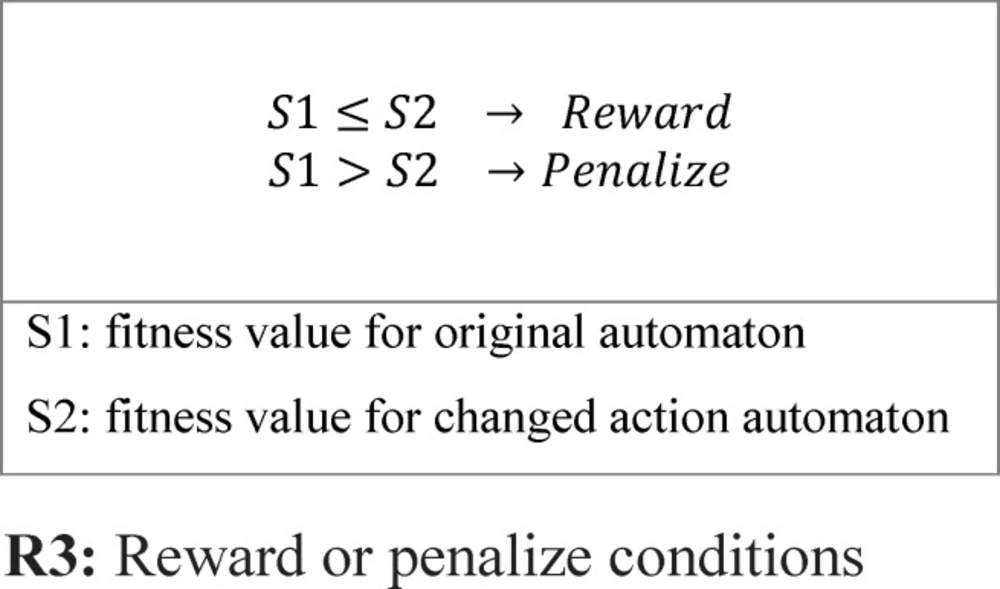
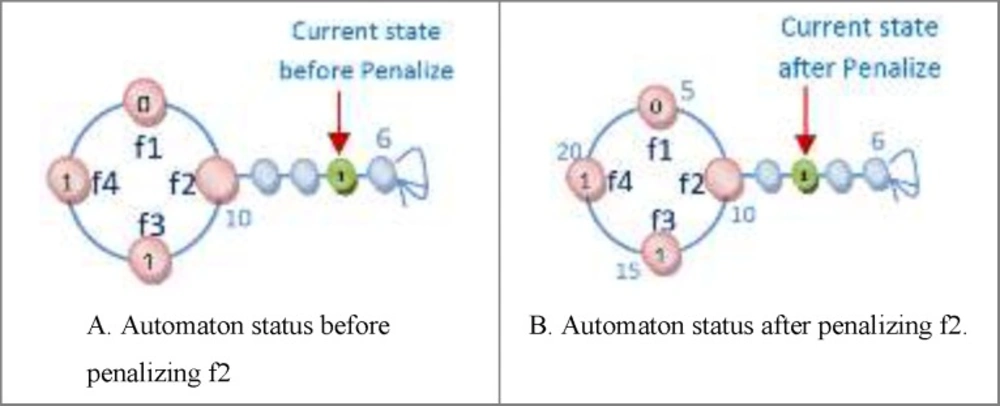
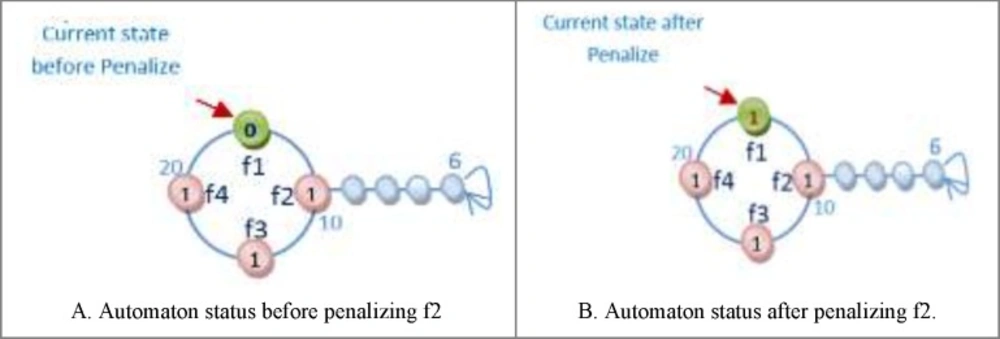
An example of Reward and Penalize relation
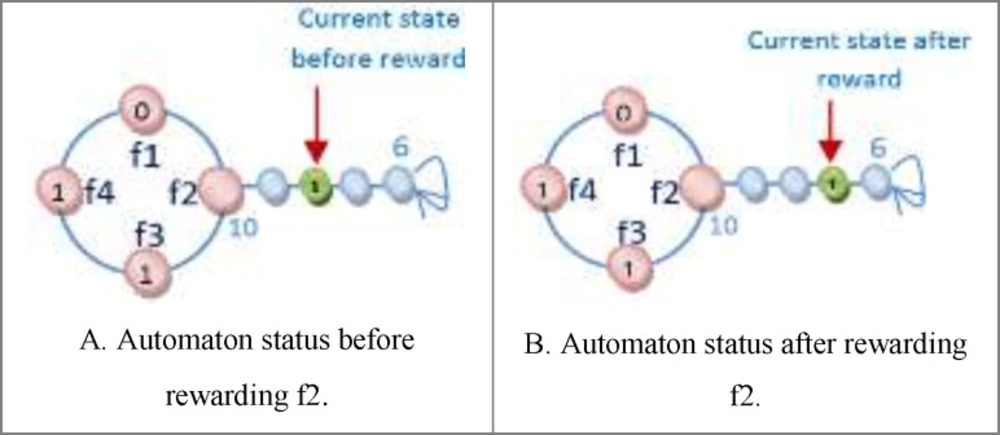
The trend of rewarding of feature f2
The trend of penalizing feature f2.
The trend of penalizing feature f1
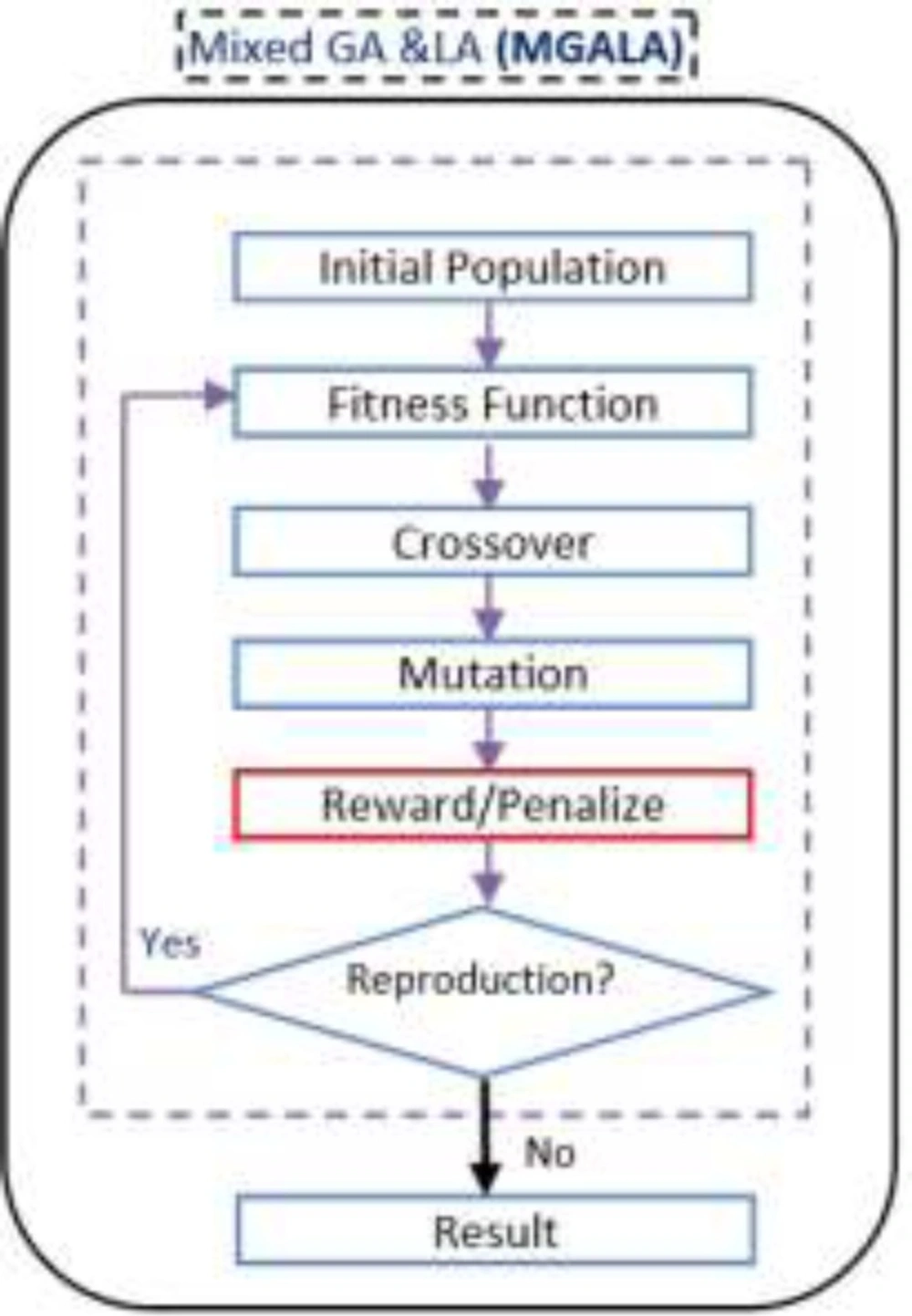
Proposed Mixed GA and LA flowchart
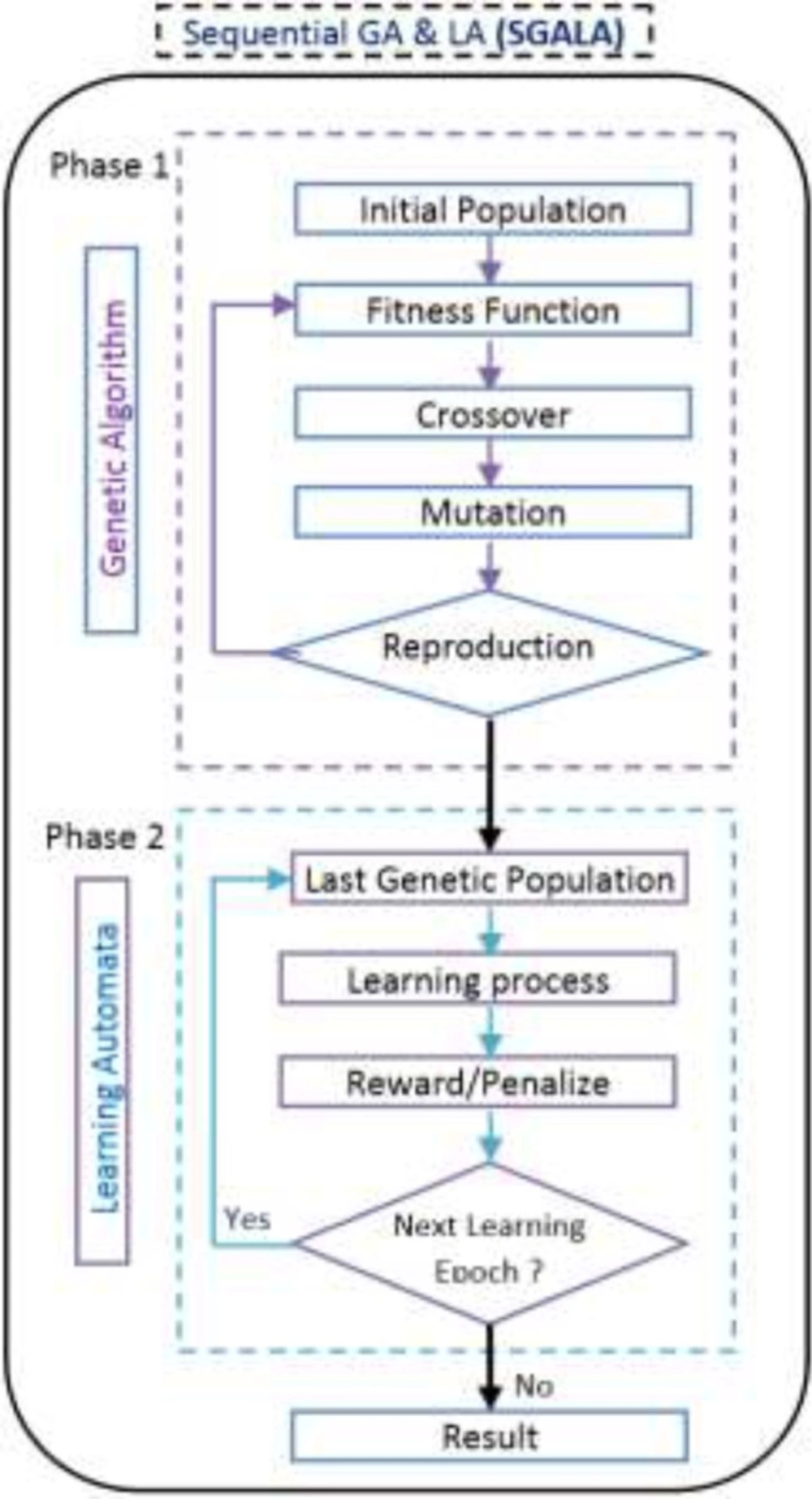
Proposed Sequential GA and LA flowchart
The variations of (A)
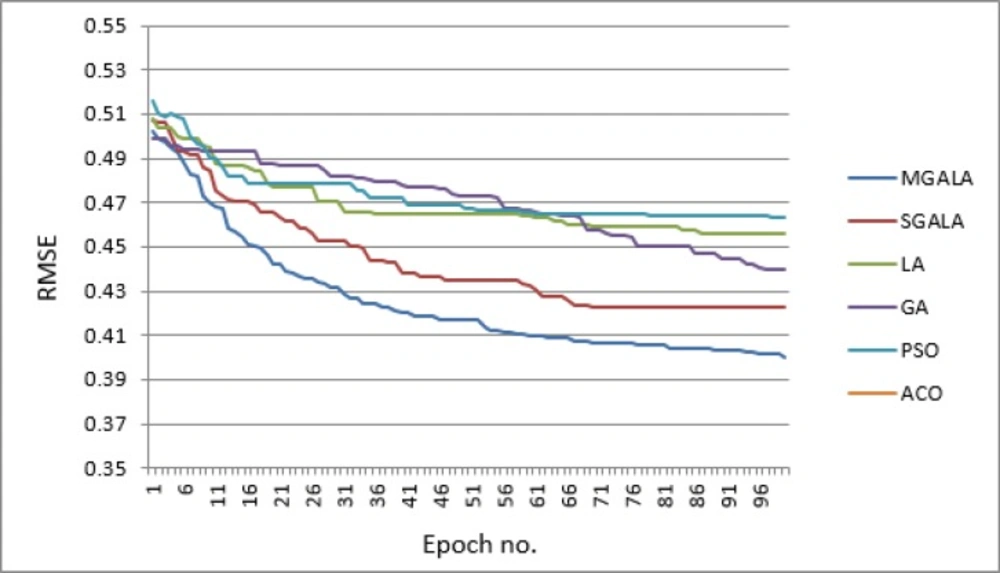
The average value of convergence process for the all mentioned algorithms on Laufer et al’s dataset. The number of generation is 100. The goal of the algorithms is minimizing RMSE value. MGALA and SGALA converge to minimum RMSE values than others
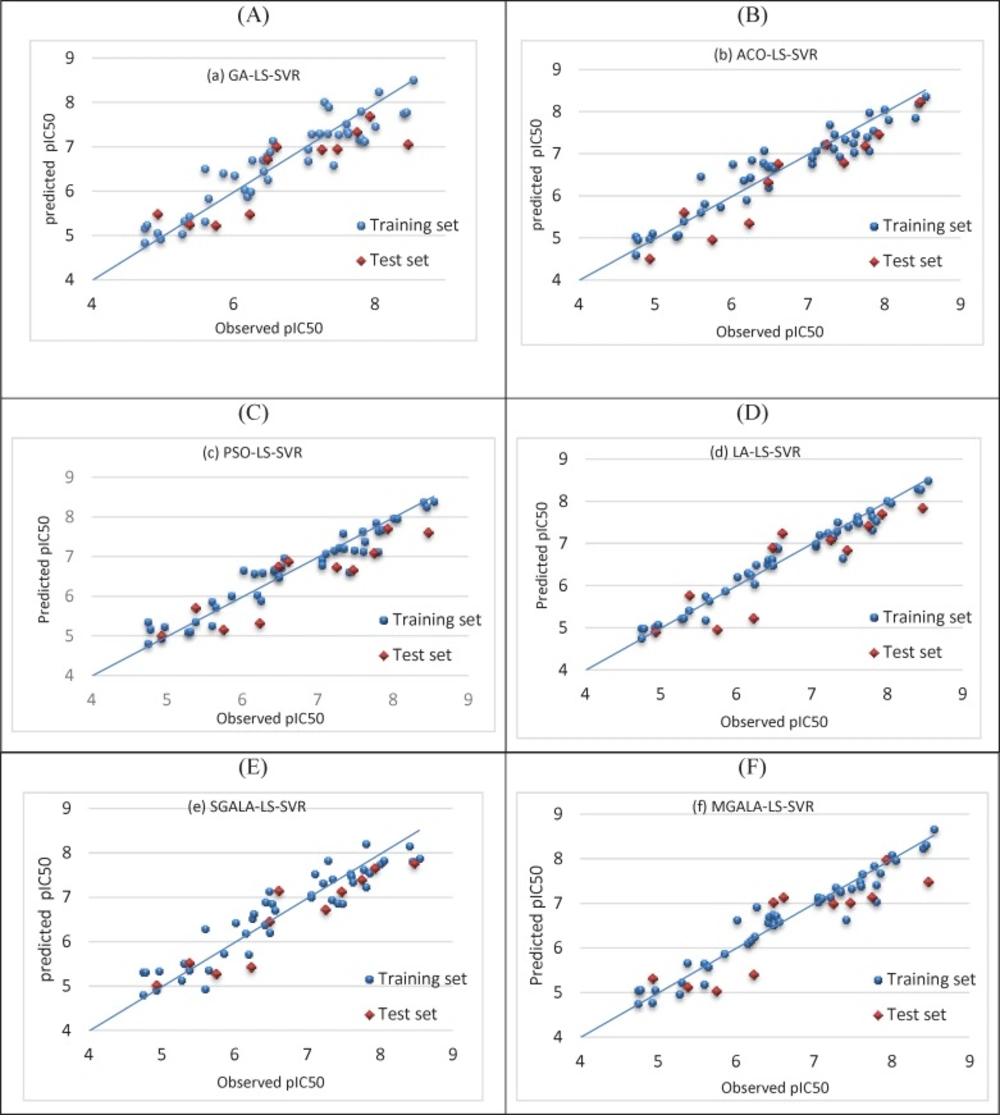
Plot of predicted pIC50 versus observed values using (A) GA-LS-SVR (
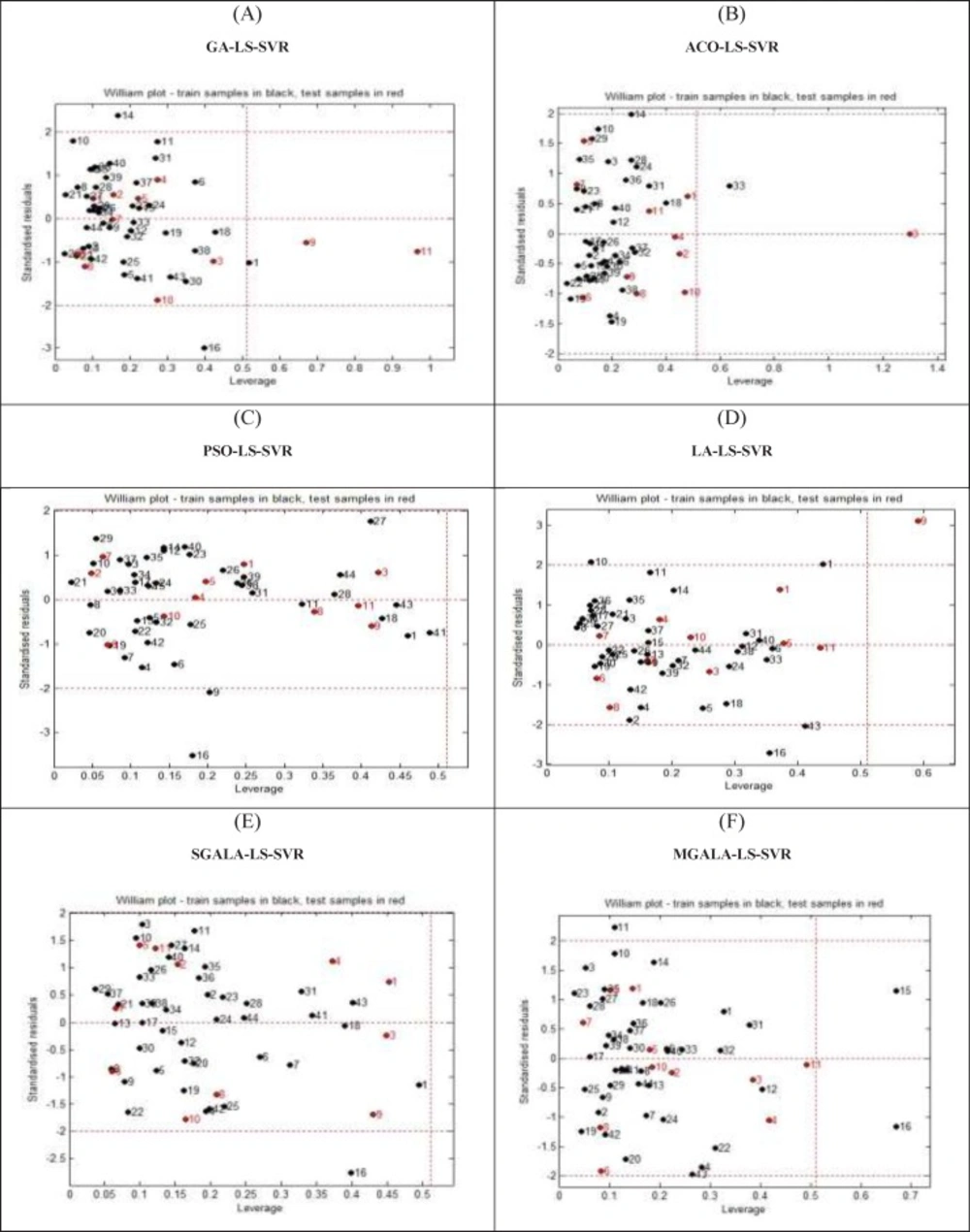
William’s plot of standardized residual versus leverage (h* = 0.54). (A) GA-LS-SVR, (B) ACO-LS-SVR, (C) PSO-LS-SVR, (D) LA-LS-SVR , (E) SGALA-LS-SVR, (F) MGALA-LS-SVR models
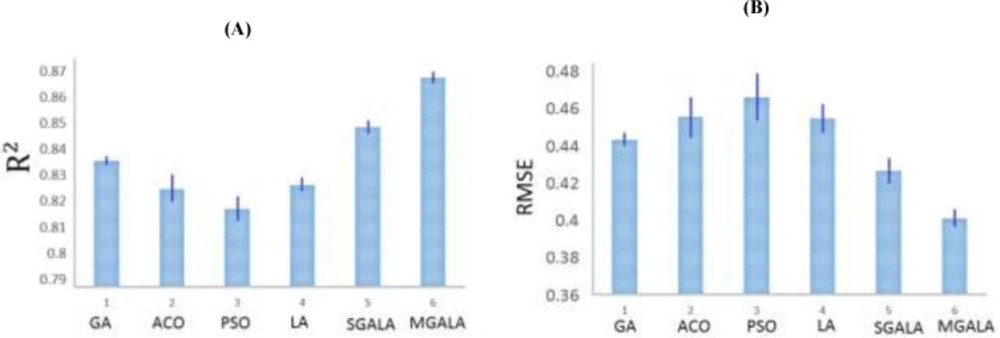
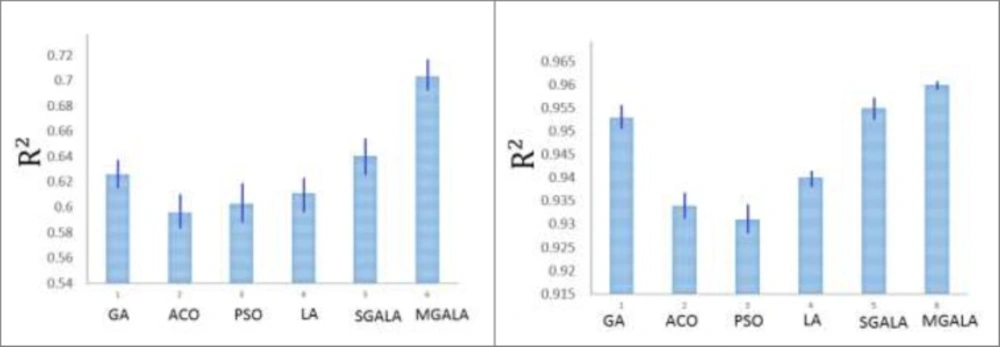
The results of variations of R2 for Table 6. (A) The R2 value for all the algorithms on Guha et al’s dataset. The MGALA and SGALA have the best R2 values than others have respectively. (B) The value for all algorithms on Calm et al’s dataset. MGALA and SGALA have the best R2 than others have respectively
Average of convergence process for all algorithms for (A) Guha et al. and (B) Calm et al. datasets
| Algorithm | GA | ACO(3, 38) | PSO(4, 39) | LA | SGALA | MGALA |
|---|---|---|---|---|---|---|
| Initial Population | 100 | 100 | 100 | 100 | 100 | 100 |
| Generation | 100 | - | - | - | 60 | 100 |
| Epoch | - | 100 | 100 | 100 | 40 | - |
| Cross over | 0.7 | - | - | - | 0.7 | 0.7 |
| Mutation | 0.3 | - | - | - | 0.3 | 0.3 |
| Memory | - | - | - | 3 | 3 | 3 |
| Inertia weight(w) | - | - | 0.8 | - | - | - |
| Acceleration constants | - | - | 1.5 | - | - | - |
| Rho | - | 0.7 | - | - | - | - |
| Algorithm | RMSE train | Running time (second) | |
|---|---|---|---|
| GA | |||
| Avg. | 0.8351 | 0.44203 | 70.1 |
| min | 0.8274 | 0.4369 | 65 |
| Max | 0.839 | 0.4523 | 76 |
| (Std.) | 0.0035 | 0.0048 | 2.982 |
| Best Result (feature names) | D/Dr05, MATS5m, MATS3v, ATS6e, SPAM, RDF035m, Mor08m, nCt | ||
| ACO | |||
| Avg. | 0.825 | 0.454 | 93.144 |
| min | 0.800 | 0.435 | 79.65 |
| Max | 0.840 | 0.486 | 106.5 |
| (Std.) | 0.010 | 0.014 | 8.736 |
| Best Result (feature names) | AMW, nCIR, RBN, DECC, BELp1, Mor17u, E3u, R1p+ | ||
| PSO | |||
| Avg. | 0.81796 | 0.46421 | 4.75012 |
| min | 0.8001 | 0.4255 | 4.2001 |
| Max | 0.8473 | 0.4868 | 5.721 |
| (Std.) | 0.0137 | 0.0178 | 0.4568 |
| Best Result (feature names) | RDF095m, C-008, RBN, ISH, SPAM, GATS6e, MATS6e, nCaH | ||
| LA | |||
| Avg. | 0.8263 | 0.4535 | 134.3 |
| min | 0.814 | 0.438 | 118 |
| Max | 0.8382 | 0.4695 | 170 |
| (Std.) | 0.0071 | 0.0092 | 19.4784 |
| Best Result (feature names) | BEHv1,MATS3m,SPAM,RDF095m, Mor03u , Mor03m, E1u, nCaH | ||
| SGALA | |||
| Avg. | 0.8470 | 0.4256 | 80.4 |
| min | 0.8315 | 0.4074 | 72 |
| Max | 0.86 | 0.4469 | 89 |
| (Std.) | 0.0071 | 0.0099 | 5.5892 |
| Best Result (feature names) | RBN, X1A, BIC4, GATS5v, RDF035m, E2m, HATS1u, H8m | ||
| MGALA | |||
| Avg. | 0.8647 | 0.4003 | 118.4 |
| min | 0.8596 | 0.3868 | 111 |
| Max | 0.8737 | 0.4079 | 125 |
| (Std.) | 0.0040 | 0.0060 | 4.4581 |
| Best Result (feature names) | RBN, PW3, SAM, RDF095m, RDF120m, nSO2, C-027,H-046 | ||
| Parameters | γ | δ2 | R2 train | RMSE train | R2 test | RMSE test |
|---|---|---|---|---|---|---|
| GA- LS-SVR | 468.323 | 1413.690 | 0.861 | 0.409 | 0.760 | 0.591 |
| ACO- LS-SVR | 74.4881 | 88.5071 | 0.9028 | 0.3440 | 0.8980 | 0.4842 |
| PSO- LS-SVR | 8.2448 | 23.6189 | 0.9290 | 0.2965 | 0.8147 | 0.5578 |
| LA-LS-SVR | 27.965 | 19.1907 | 0.964 | 0.210 | 0.786 | 0.545 |
| SGALA-LS-SVR | 119.877 | 465.674 | 0.880 | 0.381 | 0.875 | 0.443 |
| MGALA-LS-SVR | 1007.3 | 293.604 | 0.940 | 0.268 | 0.770 | 0.564 |
| Parameters | GA- LS-SVR | ACO- LS-SVR | PSO- LS-SVR | LA- LS-SVR | SGALA-LS-SVR | MGALA-LS-SVR |
|---|---|---|---|---|---|---|
| 0.698 | 0.803 | 0.731 | 0.744 | 0.830 | 0.725 | |
| 0.759 | 0.898 | 0.815 | 0.786 | 0.875 | 0.770 | |
| 0.665 | 0.897 | 0.772 | 0.776 | 0.859 | 0.750 | |
| 0.758 | 0.880 | 0.815 | 0.769 | 0.875 | 0.759 | |
| 0.123 | 0.001 | 0.053 | 0.012 | 0.018 | 0.026 | |
| 0.001 | 0.020 | 0.000 | 0.0201 | 0.000 | 0.014 | |
| 0.526 | 0.870 | 0.646 | 0.709 | 0.764 | 0.661 | |
| 0.734 | 0.777 | 0.815 | 0.685 | 0.875 | 0.689 | |
| 0.954 | 0.952 | 0.950 | 0.969 | 0.963 | 0.964 | |
| 1.041 | 1.047 | 1.048 | 1.026 | 1.035 | 1.031 |
| Dataset 1 | Dataset 2 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Feature size | Mol no. | References | Selected features no. | Feature size | Mol no. | References | Selected features no. | |||||||
| 320 | 79 | (9) | 12 | 115 | 45 | (10) | 7 | |||||||
| RMSE train | Running time (second) | RMSE train | Running time (second) | |||||||||||
| GA | ||||||||||||||
| Avg. | 0.626 | 0.413 | 220.184 | 0.953 | 0.348 | 40.332 | ||||||||
| min | 0.616 | 0.401 | 189.797 | 0.946 | 0.283 | 36.935 | ||||||||
| Max | 0.647 | 0.419 | 291.226 | 0.969 | 0.376 | 48.873 | ||||||||
| (Std.) | 0.009 | 0.005 | 27.303 | 0.006 | 0.027 | 3.740 | ||||||||
| Best Result (feature names) | MOLC#5, EMAX#1, MOMI#3, GRAV#3, CHDH#2, CHDH#3, SCDH#1, SAAA#1, SAAA#3, CHAA#2, ACHG#0 | BEHm2, ATS1m, MATS1m, DISPe, RDF020u, E3s, HTp | ||||||||||||
| ACO | ||||||||||||||
| Avg. | 0.596 | 0.428 | 101.835 | 0.934 | 0.413 | 15.344 | ||||||||
| min | 0.564 | 0.415 | 86.5 | 0.923 | 0.379 | 12.196 | ||||||||
| Max | 0.613 | 0.446 | 116.54 | 0.945 | 0.448 | 26.201 | ||||||||
| (Std.) | 0.016 | 0.009 | 10.237 | 0.007 | 0.022 | 4.081 | ||||||||
| Best Result (feature names) | MOLC#4, WTPT#2, WTPT#5, MDEC#12, MDEN#33, MREF#1, GRVH#3, NITR#5, FNSA#2, SADH#3, CHDH#3, FLEX#5 | AMW, Me, X4v, IDDE, L3m, HTp, nROR | ||||||||||||
| PSO | ||||||||||||||
| Avg. | 0.603 | 0.425 | 7.057 | 0.931 | 0.422 | 5.728 | ||||||||
| min | 0.583 | 0.410 | 0.627 | 0.9164 | 0.3821 | 4.233 | ||||||||
| Max | 0.632 | 0.436 | 11.147 | 0.9445 | 0.4687 | 7.781 | ||||||||
| (Std.) | 0.018 | 0.010 | 2.662 | 0.008 | 0.027 | 1.127 | ||||||||
| Best Result (feature names) | 2SP2#1, CHAA#2, CHDH#2, WNSA#1, WTPT#4, PNSA#2, N2P#1, SADH#2, SADH#1, NITR#5, SURR#1, MOLC#3 | R1u, nF, S2K, nROR, L3m, AMW, HTp | ||||||||||||
| LA | ||||||||||||||
| Avg. | 0.61146 | 0.4215 | 265.617 | 0.940 | 0.393 | 56.644 | ||||||||
| min | 0.5945 | 0.4022 | 215.16 | 0.934 | 0.372 | 44.469 | ||||||||
| Max | 0.646 | 0.430 | 307.315 | 0.947 | 0.413 | 74.579 | ||||||||
| (Std.) | 0.016 | 0.008 | 31.762 | 0.003 | 0.012 | 9.514 | ||||||||
| Best Result (feature names) | V3CH#15, WTPT#4, MDEC#34, MDEO#12, MREF#1, EMIN#1, MOMI#1, VOL#150, homo#0, WPSA#1, FNHS#1, RNH#1 | ATS2e, RPCG, DISPe, L3m, H0e, HTp, F082 | ||||||||||||
| SGALA | ||||||||||||||
| Avg. | 0.6409 | 0.4051 | 270.678 | 0.955 | 0.340 | 61.969 | ||||||||
| min | 0.624 | 0.382 | 245.521 | 0.946 | 0.312 | 46.548 | ||||||||
| Max | 0.680 | 0.414 | 298.413 | 0.962 | 0.374 | 76.731 | ||||||||
| (Std.) | 0.017 | 0.009 | 18.779 | 0.005 | 0.019 | 9.553 | ||||||||
| Best Result (feature names) | KAPA#2, KAPA#4, ALLP#1, ALLP#2, V4PC#12, N6CH#16, N7CH#20, NITR#5, FNSA#3, RNCG#1, SCDH#2, FNHS#1 | IDDE, SHP2, DISPe, L3m, H0e, HTp, Hy | ||||||||||||
| MGALA | ||||||||||||||
| Avg. | 0.704 | 0.371 | 627.026 | 0.960 | 0.322 | 124.922 | ||||||||
| min | 0.684 | 0.352 | 555.923 | 0.958 | 0.302 | 89.526 | ||||||||
| Max | 0.727 | 0.390 | 709.474 | 0.965 | 0.329 | 150.749 | ||||||||
| (Std.) | 0.013 | 0.010 | 53.150 | 0.001 | 0.007 | 20.326 | ||||||||
| Best Result (feature names) | KAPA#2, KAPA#4, ALLP#4, V5CH#17, S6CH#18, MOLC#1, SADH#2, CHDH#1, CHDH#3, SAAA#2, ACHG#0, SURR#5 | GGI1, DISPe, RDF020u, E3s, H0e, HTp, Hy | ||||||||||||
