


1. Background
In recent years, new sports and rehabilitation technologies have been introduced to improve body flexibility, as well as muscle and leg strength. Future innovations will also occur by progress in sports exercises and therapy, which requires engineering expertise. Hence, by employing modern technological solutions, new devices are introduced to people who would like to improve physical fitness, leg performance, split performance, and ultimately leg strength (1).
High flexibility and strength of legs have advantages for muscles. Avoiding injuries, reducing muscle pain, and increasing physical performance are of the advantages of improving physical readiness using training devices and leg rehabilitation (2).
Increasing the flexibility of legs and improving the split performance will increase the quality of life and defense power. It leads to achieving the independence of body function. Hence, high flexibility of legs increases the muscle elasticity and the range of joint motion. These factors improve body movements. In the absence of physical fitness, a jump on an uneven surface can cause injuries. The lack of physical readiness in the leg area during the rehabilitation process may cause medical problems such as the rupture of lower limbs or return to rehabilitation or treatment stage.
Unfortunately, people who are providing medical services for the rehabilitation of the legs have less equipment. Hence, medical device companies have provided devices in this field including multi-hip machines although they are accompanied by problems (3, 4). The problem with these devices is the lack of smart and electronic control of the device, which causes a delay in the improvement of leg muscles. Therefore, exercises are very difficult compared to the presented plan. Repetition and practice are very important in improving physical fitness and rehabilitation. The presented plan gives the person the opportunity to do exercises by repeating the act at different intervals by the electronic setting of the system. Moreover, considering that training practice or rehabilitation is a sensitive action for legs, it has been tried to prevent possible medical risks for a person during rehabilitation and training. A simple fabric leg stretch machine is used traditionally. The leg stretch machine is mainly used in the military. The results of the studies have shown that the simple fabric stretchers are not comfortable and some parts of the subjects’ body will be at the risk of ischemia and injury in the long-term (3, 4).
2. Objectives
The aim of this study was to design and construct a device that could help improve the function of lower limbs.
3. Methods
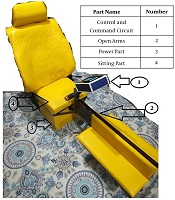
The presented device in this study has two arms attached to the legs and the user can adjust the leg practice or record the process intelligently through a control panel. According to the technical principles of the plan, there are three parts including an arm for moving the legs in abduction and adduction motions within the coronal plane involving the medial-lateral motions of the limbs, armpit, and arm controller; thus, the most functionality occurs in the attached part to the legs. The device has an electronic diagnostic system. The user sets leg displacement, leg workout mode, and recording and repeatability of the states. The arm component of the electronic system determines the displacement, the speed, and the repeatability of the motion using an available sensor (Figure 1). Based on the calculation of the displacement range, the speed and machine operators in the processor of this machine, the data are given to operators (arm adjustment mechanism), with operators rotating the arm of the engines to move the legs to a 180-degree angle (Figure 2). As previously stated, the available devices in the market do not solve the problem of flexibility of legs during training or rehabilitation in an intelligent manner.

The schematic view of the sports and rehabilitation device

The sports and rehabilitation device constructed in this study
3.1. Implementation Method
The first step was to model the mechanical parts or design mechanical parts in CATIA software. After designing and assembling mechanical parts in CATIA software, we designed the parts to be assembled or manufactured in CNC machines. In these machines, which were driven by a computer, we initially introduced the design created by CATIA software into the computer; then, it converted to G code, and after inserting the desired material in the machine, the parts were cut by the CNC machine. Here, mechanical components made of compressed plastic or Teflon were ready for the next stage of the electronic component.
To prepare the electronic component, we used the PSpice software to simulate the electronic circuit. We designed and implemented it in Proteus software. Finally, the designed electronic boards were transported to companies for the assembly. These companies manufactured the electronic boards designed by Proteus. The circuit controller was programmed during the process of designing the electronic boards by Code Vision. This program that was run by the circuit controller (AVR controller) could control the electronic circuit. When electronic boards were ready, the electronic components (capacitors, inductors, IC, and microelectronic components) were mounted on the circuit. We prepared the electronic part of the system to control the motor system (or mechanical actuator). Then, the mechanical and electronic parts were connected and the final system was tested.
3.2. Technical Design Principles
The components included an ATmega64 microcontroller, an angle adjustment sensor, an engine with a gearbox from 300 to 3000 rpm, a power supply, and a microprocessor including resistance, capacitor, inductor, diode, body chassis, and speed control system (Figure 3).

Technical principles of the system
3.3. Ethical Consideration
This study was confirmed by the Ethics Committee of Baqiyatallah University of Medical Sciences (ethics code: IR.BMSU.REC.1396.522).
4. Results
According to the study design, the subject adjusts the angle between the two lower limbs in the device panel. Then, the device arms automatically start to reach the desired angle. Under this condition, the setting of the angle between the person’s lower limb relative to the command of the person occurs repeatedly. Considering different angles between two lower limbs, subject adjust the device to provide the angle between the two lower limbs so that one can easily tolerate the angle created between the two lower limbs. This industrial design has many benefits, including preventing damage to individuals, saving cost, preventing person balance, and accelerating practical and rehab actions. The advanced design of this muscle stretch device helps patients and athletes not to feel any force in any angular position and it would lead to their relaxation.
4.1. Method and System Performance Procedure
The designed device has two arms, which are attached to the legs, and can adjust the leg practice or record the process intelligently through a user’s control panel. The device is highly equipped with a power supply, which provides approximately a 3-hour full-time practice. Another reason for using this device is the removal of the rod attached to the mold taken in the foot area, which makes it easy for athletes and patients to use; moreover, it is easily portable. Using this apparatus is extremely important due to its low weight. The application of this system is in directions (y+) and (y-) of the geometric coordinates, which facilitates the setting of the angle in these two paths as the main paths of foot adjustment. The system begins to alert by angular changes. This warning directly sends the command to the engine and gear, and the system automatically adjusts the angle for the joints of the machine.
5. Discussion
As stated, the main goal of the study was to design and introduce a flexible and adjustable system in the area between two legs. In this study, a new type of leg’s muscle stretch device was compared with its conventional type. The conventional type of these devices is non-standard and lacks an intelligent controller for leg angular adjustment during practicing. However, the new device used in this study increased the safety and comfort of adjusting the angle between the two legs (5). In other words, the displacement between the two legs exerted less pressure to athletes and patients, causing them to remain stable and inactive, which is an important advantage. However, in leg muscles stretching devices available in the market, the lack of these facilities can cause serious damage to athletes and increase costs. Additionally, our device can be cost-effective over time (6).
Irreparable damage has been observed in the course of displacement with the usual leg muscles stretching devices. This concern in our industrial design was resolved. Our design has many advantages, including preventing damage to athletes, saving costs, improving the individual’s balance and speeding up the work out of people with pain in the pelvic area (7).
